Numerical time integration in optimal control problems
Nova sessió dels EEBE Seminars on Computational Mechanics - Spring 2024
- https://eebe.upc.edu/ca/esdeveniments/numerical-time-integration-in-optimal-control-problems
- Numerical time integration in optimal control problems
- 2024-03-13T12:00:00+01:00
- 2024-03-13T13:00:00+01:00
- Nova sessió dels EEBE Seminars on Computational Mechanics - Spring 2024
13/03/2024 de 12:00 a 13:00 (Europe/Madrid / UTC100)
Aula A1.08
 Arriba una sessió dels 'EEBE Seminars on Computational Mechanics - Spring 2024', coordinats pels professors de l'Escola Lluís Jofre i Jose Muñoz.
Arriba una sessió dels 'EEBE Seminars on Computational Mechanics - Spring 2024', coordinats pels professors de l'Escola Lluís Jofre i Jose Muñoz.
En aquesta ocasió anirà a càrrec d'Ashutosh Bijalwan estudiant de doctorat al Centre Internacional de Mètodes Numèrics en Enginyeria (CIMNE), amb la ponència Numerical time integration in optimal control problems.
Resum:
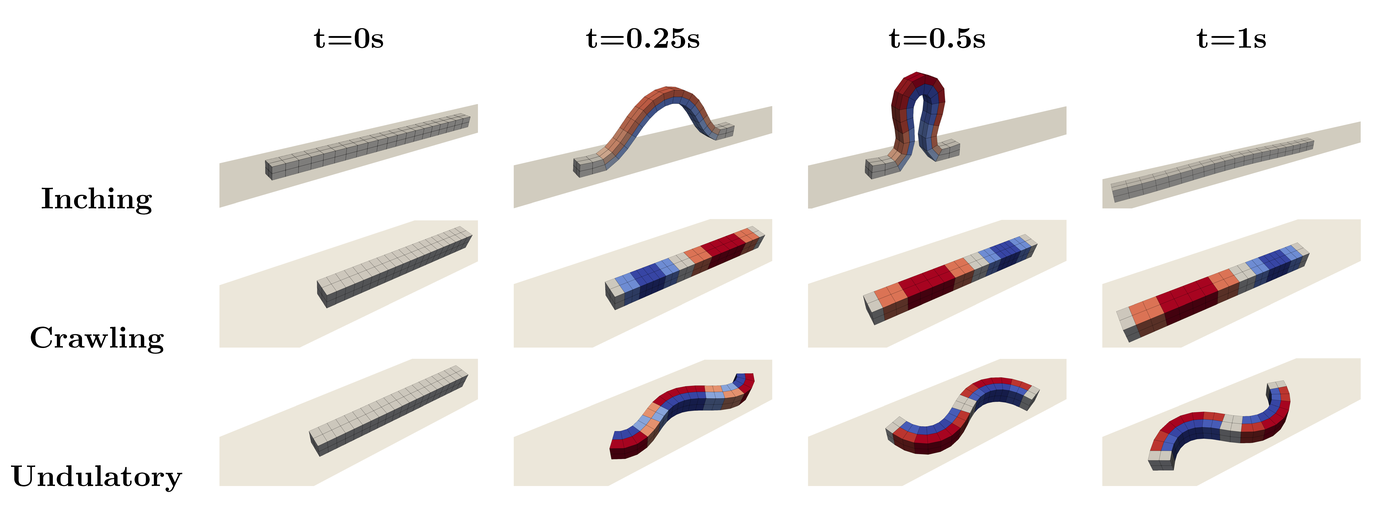
A la natura, els organismes llargs i sense extremitats es desplacen en un medi mitjançant la deformació periòdica de la seva forma corporal. La seva adaptabilitat als entorns canviant i la identificació del mecanisme de control regulador darrere d'aquesta adaptabilitat encara és una qüestió oberta per a la comunitat científica. Per abordar aquests reptes, els investigadors sovint recorren als principis de la teoria del control òptim. Per estudiar la locomoció sense extremitats, presentem un element contractil 2D i 3D que imita el gran rang de locomoció com ara ondulatori, reptant i passos curts. A continuació, les equacions diferencials parcials governants (EDP) es transformen en equacions diferencials-àlgèbriques (EDA) continuades en el temps. A més, deduïm les condicions necessàries i discutim l'estructura simplèctica de la solució. Finalment, recorrem a la integració simplèctica de les condicions d'optimitat i resolem el problema de programació no lineal resultant de manera eficient amb una estratègia iterativa. En aquest seminari, tenim com a objectiu presentar (a) la mecànica de la locomoció sense extremitats, (b) el sistema de control mecànic EDA d'índex 1 i índex 3, (c) simetries i lleis de conservació, i (d) solució numèrica del problema de control òptim.
Bio del ponent:
Ashutosh Bijalwan actualment treballa com a estudiant de doctorat al grup d'interfícies de materials suaus i vius, CIMNE. Va obtenir el seu màster (Cum Laude) en Mecànica d'Enginyeria al departament de mecànica aplicada, a l'Institut Indi de Tecnologia Delhi (IITD). Després de la seva graduació, va treballar amb Eaton i Schlumberger com a enginyer de modelització i simulació. Després de completar 4 anys en la indústria, va rebre la prestigiosa beca Severo Ochoa per realitzar recerca sobre la locomoció dels cucs sota la supervisió del Dr. Jose J Munoz. Durant tres mesos, també va ser investigador visitant a KIT, Alemanya, sota l'ombrel·la del programa Severo Ochoa. Té una sòlida formació en recerca en Mecànica del Continu, Mètodes Numèrics (MFE), Biomecànica i Desenvolupament de Productes.
Comparteix: